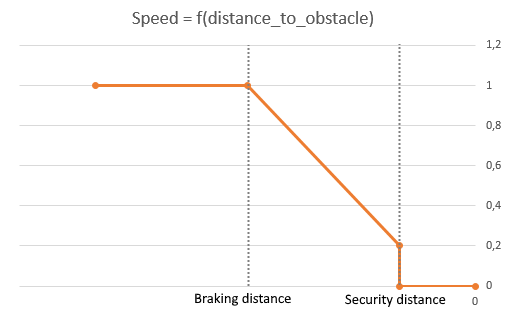
Slowing down
A safety improvements consists in slowing down when the robot detects an obstacle.
It prevents Robbie from bumping into obstacles.
The decrease of speed during the slow down is a linear function of the distance to the obstacle.
/*
@desc :
* the function is called while the robot is already moving
* adapt the speed to the distance the robot still has to cover or to the obstacles the robot is going to meet.
@param :
* int max_speed : max_speed of the motor during the movement
* int maxDistance : the distance the robot has to do should not be more than maxDistance (example : an obstacle has to be discovered at maxDistance in front of the robot)
* int securityDistance : the robot is supposed to stop closed to securityDistance of an obstacle (here only used to ajust the speed)
* int brakingDistance : the robot will begin to brake at brakingDistance
* int speedDivider : the max_speed will be divided by this factor along the braking period.
@return : the return value will be 1 if the robot had to shorten his previous path or 0 else.
*/
char manage_speed(int max_speed, int maxDistance,int securityDistance,int brakingDistance, int speedDivider){
int distance;
int angle;
int deltaAngle = fabs(leftFinalPosition-leftStartPosition)-fabs(get_left_motor_position()-leftStartPosition);
char distanceMaxDone = 1;
if(deltaAngle<0){
distance=0;
deltaAngle=0;
}
else{
distance = angle_to_distance(deltaAngle);
}
//printf("Distance remaining : %d \n",distance);
//printf("Maximum distance that the robot should do : %d \n",maxDistance);
if(distance > maxDistance && brakingDistance > maxDistance){ // testing if the robot has detected stg forcing the robot to stop earlier than in the forecast.
distance = maxDistance;
deltaAngle = distance_to_angle(distance);
leftFinalPosition = get_left_motor_position() + deltaAngle;
rightFinalPosition = get_right_motor_position() + deltaAngle;
distanceMaxDone = 0;
}
// distance used in processing of the new speed.
if(distance > maxDistance){
distance = maxDistance;
}
// Calculate the new speed and send the new order to the motor : regular braking
int newSpeed = max_speed - (((speedDivider-1)*max_speed/speedDivider)*(brakingDistance-distance))/(brakingDistance-securityDistance);
if(newSpeed > max_speed){
newSpeed=max_speed;
}
multi_set_tacho_speed_sp(sn_wheels, newSpeed);
multi_set_tacho_position_sp(sn_wheels, deltaAngle);
multi_set_tacho_command_inx(sn_wheels, TACHO_HOLD);
return distanceMaxDone;
}