Implementing basic functions of the robot
To reduce the difficulty of designing the algorithm, we limit our functions to "move forward", "rotation to either 90, 180 or 270 degrees" and "test if the robot can move forward"
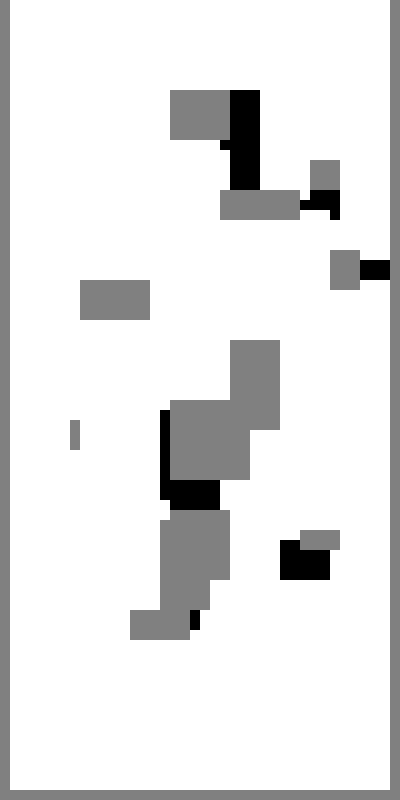
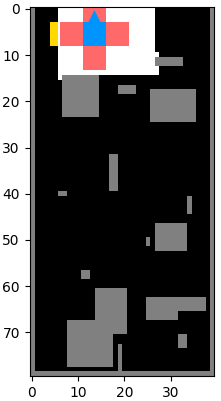
Test if movement forward is possible :
def can_move_forward():
"""
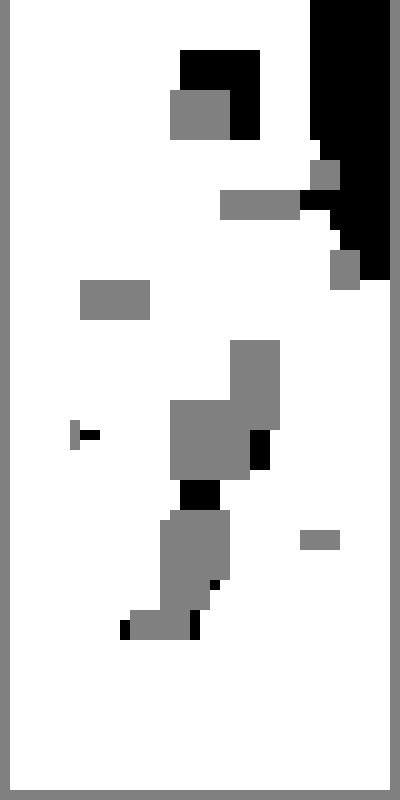
Discover the cells situated just in front of the robot and returns a boolean : True if the robot can move forward..
"""
global globx
global globX
global globy
global globY
global TETA
global directionX
global directionY
global cost
global Map2
is_possible=True
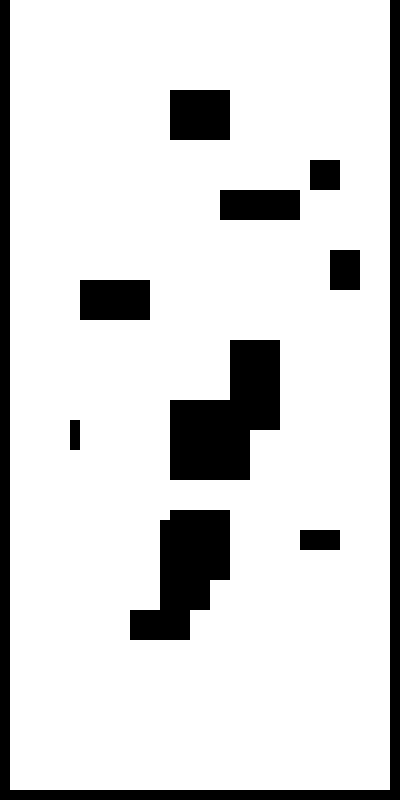
# Check if the robot won't go outside the arena
if (directionY==1 and globy==h-2) or (directionY==-1 and globy==2) or (directionX==1 and globx==w-2) or (directionX==-1 and globx==2) :
is_possible = False
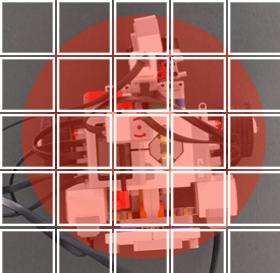
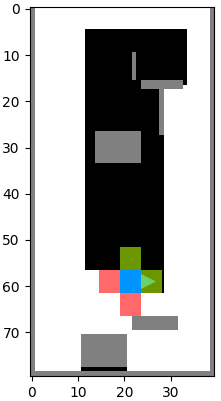
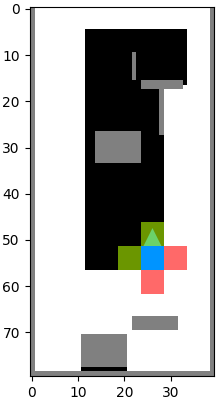
# The 5 following statements enable to test the 5 cells situated in front of the robot
if Map[globy+3*directionY-2*null(directionY),globx+3*directionX-2*null(directionX)]==1:
is_possible = False
Map2[globy+3*directionY-2*null(directionY),globx+3*directionX-2*null(directionX)]=128
else:
Map2[globy+3*directionY-2*null(directionY),globx+3*directionX-2*null(directionX)]=255
if Map[globy+3*directionY-null(directionY),globx+3*directionX-null(directionX)]==1:
is_possible = False
Map2[globy+3*directionY-null(directionY),globx+3*directionX-null(directionX)]=128
else:
Map2[globy+3*directionY-null(directionY),globx+3*directionX-null(directionX)]=255
if Map[globy+3*directionY,globx+3*directionX]==1:
is_possible = False
Map2[globy+3*directionY,globx+3*directionX]=128
else:
Map2[globy+3*directionY,globx+3*directionX]=255
if Map[globy+3*directionY+null(directionY),globx+3*directionX+null(directionX)]==1:
is_possible = False
Map2[globy+3*directionY+null(directionY),globx+3*directionX+null(directionX)]=128
else:
Map2[globy+3*directionY+null(directionY),globx+3*directionX+null(directionX)]=255
if Map[globy+3*directionY+2*null(directionY),globx+3*directionX+2*null(directionX)]==1:
is_possible = False
Map2[globy+3*directionY+2*null(directionY),globx+3*directionX+2*null(directionX)]=128
else:
Map2[globy+3*directionY+2*null(directionY),globx+3*directionX+2*null(directionX)]=255
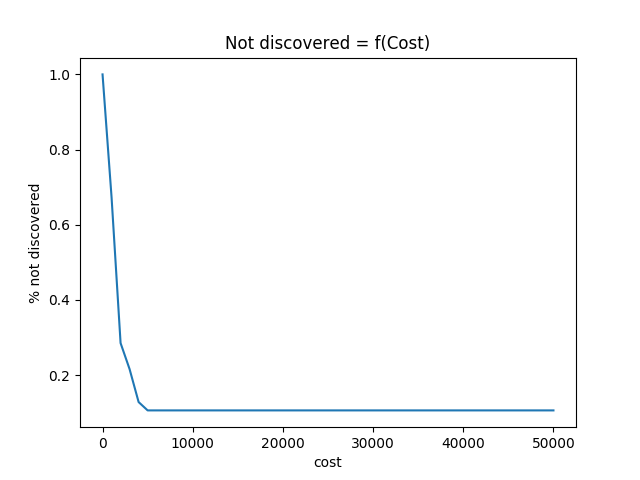
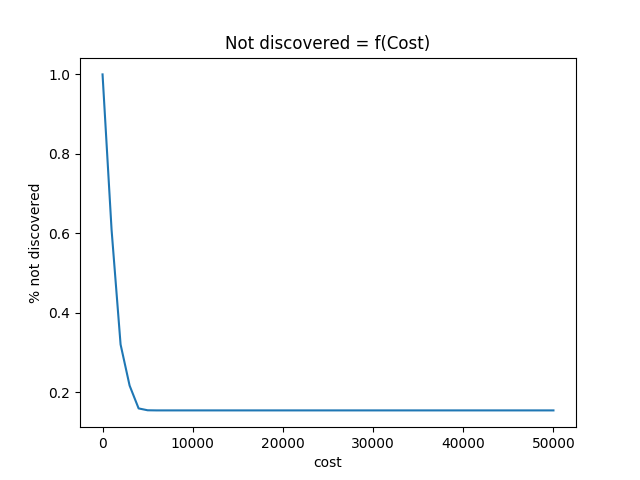
# assess the cost represented by the use of the function
increase_cost(2)
return is_possible
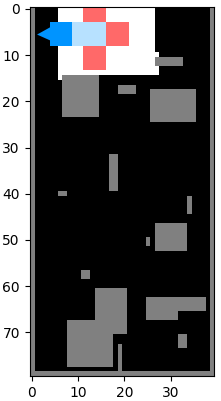
Move forward and rotate :
def move_forward():
"""
The function enables to move the robot 5cm forward if it is possible.
It returns True if the movement has been possible.
"""
global globx
global globX
global globy
global globY
global TETA
global directionX
global directionY
global cost
if can_move_forward():
globX=globX+5*directionX
globY=globY+5*directionY
globx=int(globX/5)
globy=int(globY/5)
increase_cost(1)
return True
else:
return False
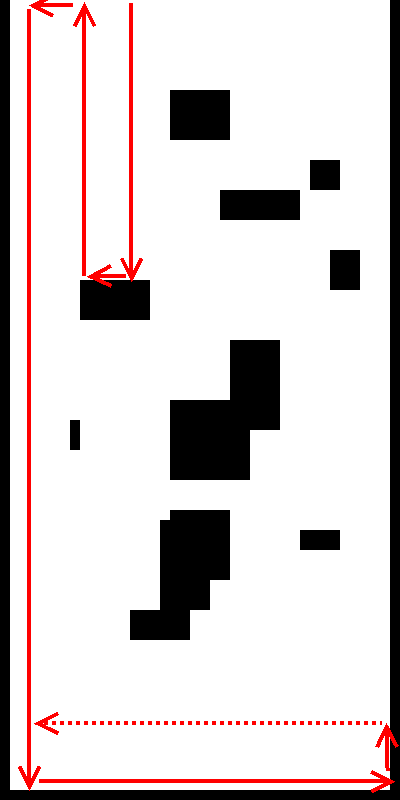
def move_forward_until(max_pos):
"""
The function enables to move the robot forward until max_pos has been reached or the robot cannot move anymore.
It returns the number of cells the robot has been able to do.
"""
global globx
global globX
global globy
global globY
global TETA
global directionX
global directionY
global cost
i = 0
while i < max_pos and can_move_forward():
globX=globX+5*directionX
globY=globY+5*directionY
globx=int(globX/5)
globy=int(globY/5)
increase_cost(1)
i=i+1
return i
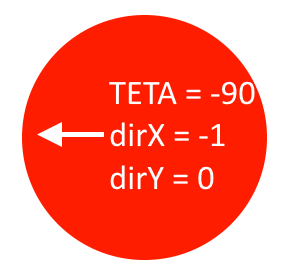
def rotate(angle):
"""
The function enables to rotate the robot of a certain angle.
"""
global TETA
global directionX
global directionY
global cost
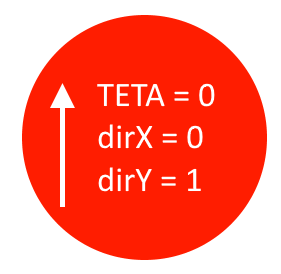
TETA=(TETA+angle)%360
if TETA==0:
directionX = 0
directionY = 1
elif TETA==90:
directionX = 1
directionY = 0
elif TETA ==180:
directionX=0
directionY=-1
else:
directionX=-1
directionY=0
increase_cost(1)